Robotics projects
Exploring Mechanics and Control Systems. Students delve into the fascinating world of robotics as they work on the Robotic Arm project.
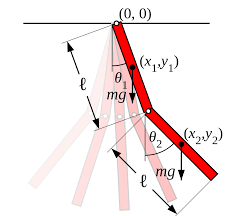
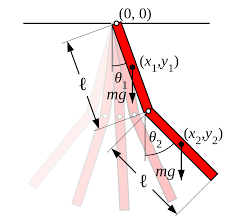
This study models the dynamic behavior of a double pendulum using classical mechanics principles, specifically the Euler-Lagrange formulation. A MATLAB simulation is conducted to understand the angular displacement and velocity of both links over time. The chaotic yet deterministic nature of this nonlinear system is highlighted.
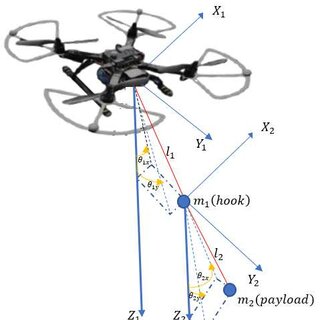

In this project, we aim to simulate the motion of a double pendulum and its interaction with a quadrotor using the fundamental concepts of classical mechanics. The system consists of a pendulum attached to a quadrotor, where the quadrotor must track the pendulum’s position and velocity through precise control. The goal is to simulate the system's dynamics and visualize the trajectory of both the pendulum and the quadrotor.
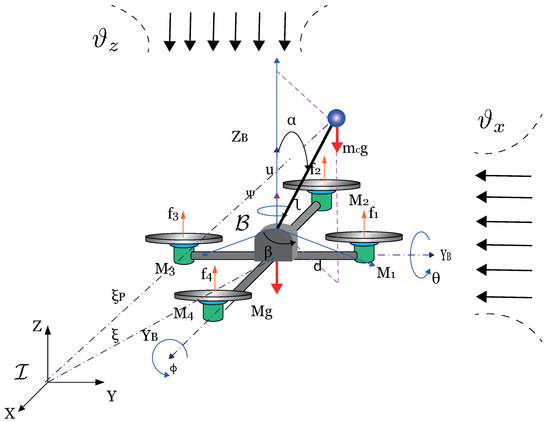
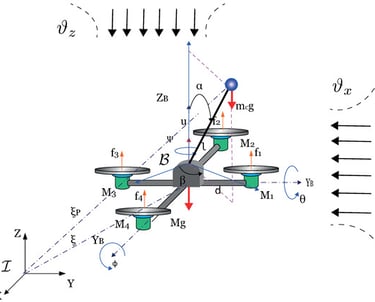
This simulation models a pendulum suspended from a quadrotor. The pendulum moves freely under the influence of gravity, while the quadrotor dynamically adjusts its position and attitude to track the pendulum’s motion. The quadrotor uses proportional-derivative (PD) control strategies for both position and attitude to achieve smooth and stable tracking of the pendulum.
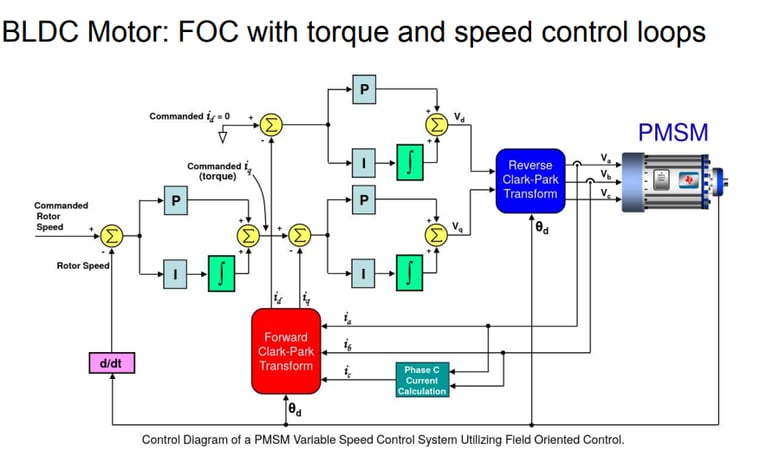
Field-Oriented Control (FOC), also known as vector control, is a technique used to control the torque and speed of a Permanent Magnet Synchronous Motor (PMSM). This control strategy provides precise motor dynamics by controlling the motor currents in a rotating reference frame, allowing efficient and smooth operation.
Innovation
Explore robotics and AI for real-world applications.
Research
Insights
rahulkyu062@gmail.com
8651879587
© 2025. All rights reserved.