Integrated Simulation of a Quadrotor‑Tracked Double Pendulum System
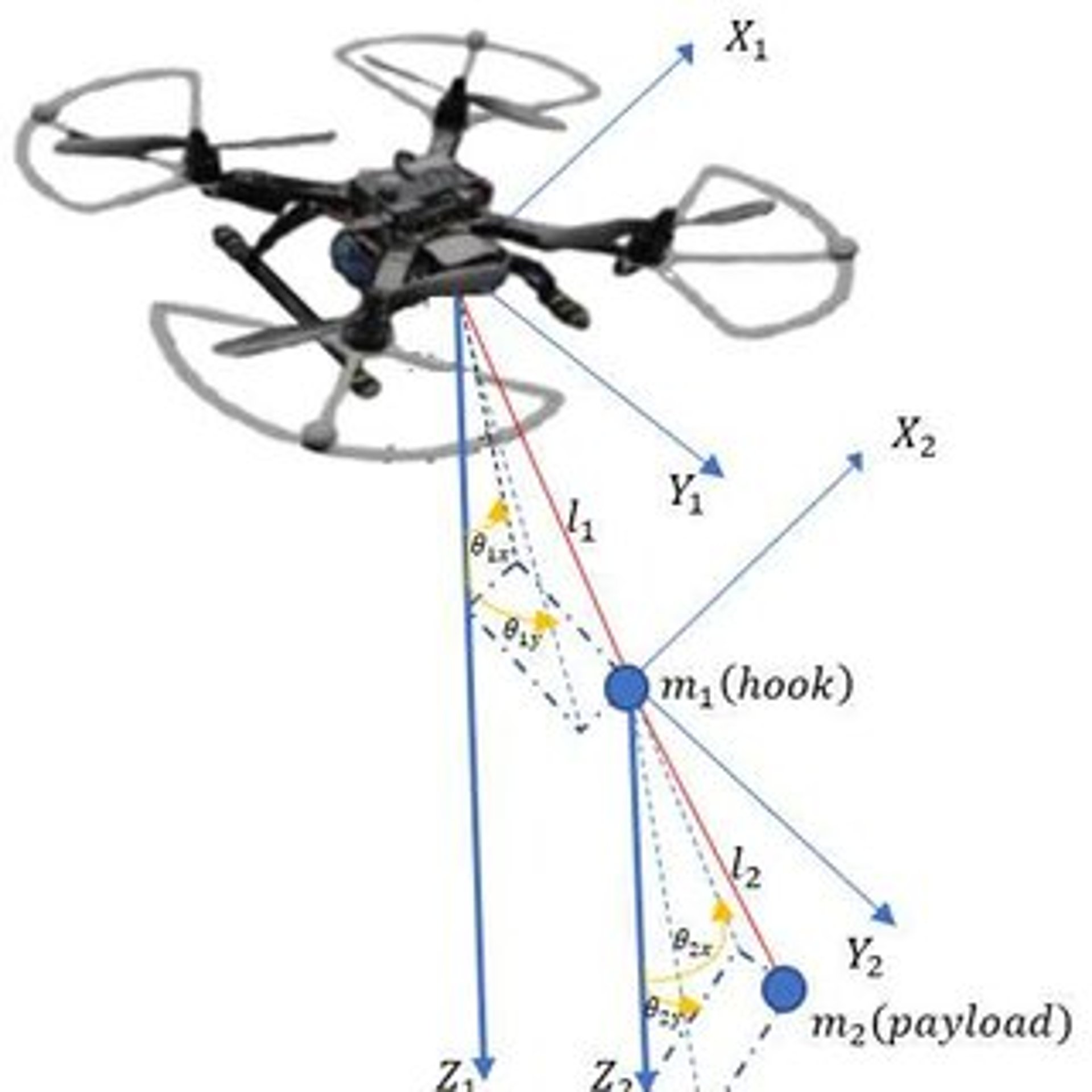
An integrated simulation where a double pendulum swings freely under gravity while a quadrotor uses PD control in both position and attitude to track the pendulum’s tip in real time. By combining Euler‑Lagrange dynamics for the pendulum with feedback control for the quadrotor, the model visualizes both trajectories and demonstrates coordinated motion in 3D space.