Coordinated Simulation of a Quadrotor Tracking an Inverted Pendulum in 3D Space
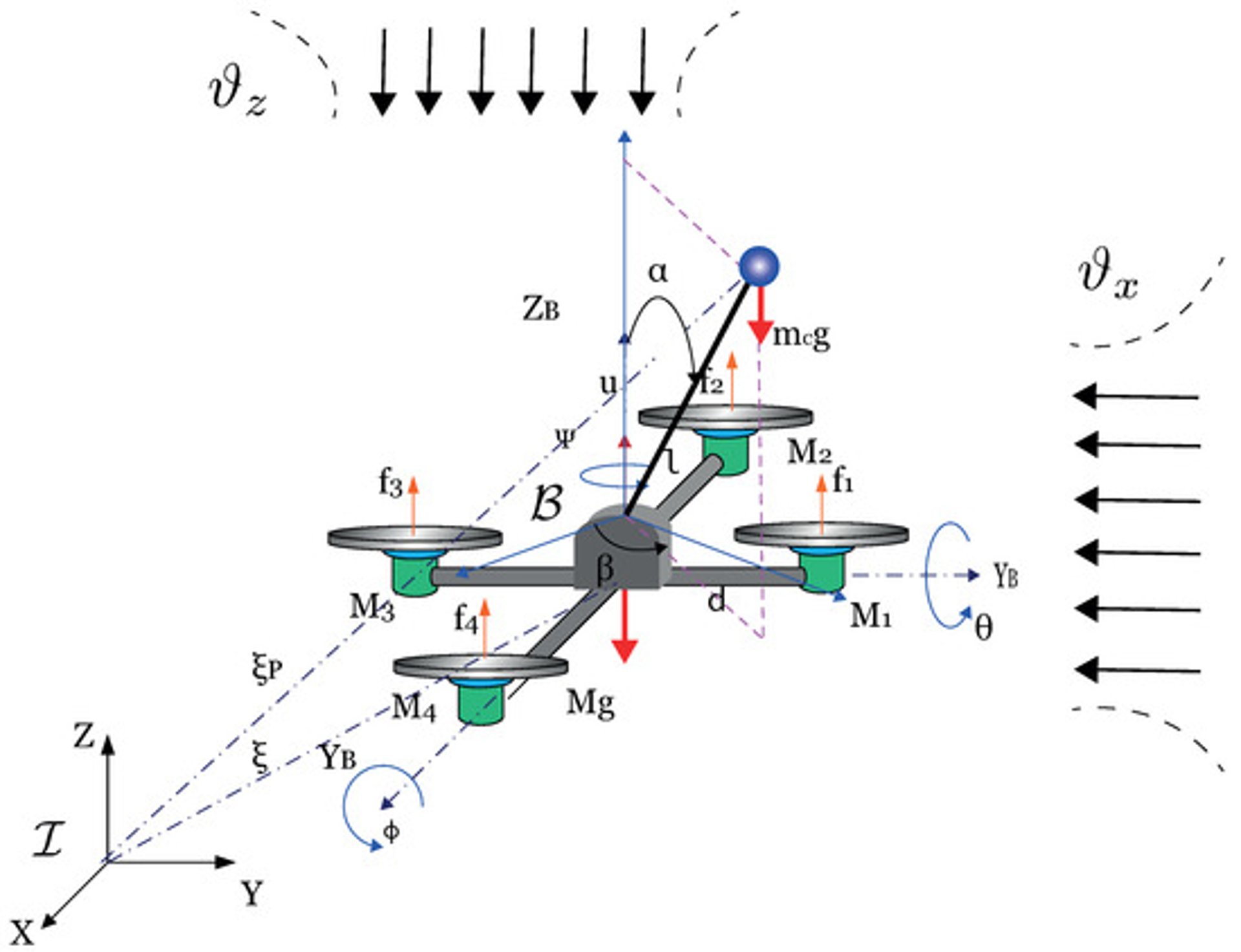
This simulation models a pendulum suspended from a quadrotor. The pendulum moves freely under the influence of gravity, while the quadrotor dynamically adjusts its position and attitude to track the pendulum’s motion. The quadrotor uses proportional-derivative (PD) control strategies for position and attitude to achieve smooth and stable tracking.